
مقاله حاضر به بررسی پارامترهای PID و کاربردهای آن در اینورترهای صنعتی NEO میپردازد. کنترلر PID یکی از مهمترین ابزارهای کنترلی در صنعت است که با تنظیم دقیق پارامترهای تناسبی (P)، انتگرالی (I)، و مشتقی (D)، دقت، پایداری و پاسخگویی سیستم را در کاربردهایی مانند کنترل فشار، دما، جریان و سطح مایعات بهبود میبخشد. در این مقاله، تنظیمات PID در اینورترهای NEO بر اساس مستندات فنی ارائه شده است
📊 مقدمه
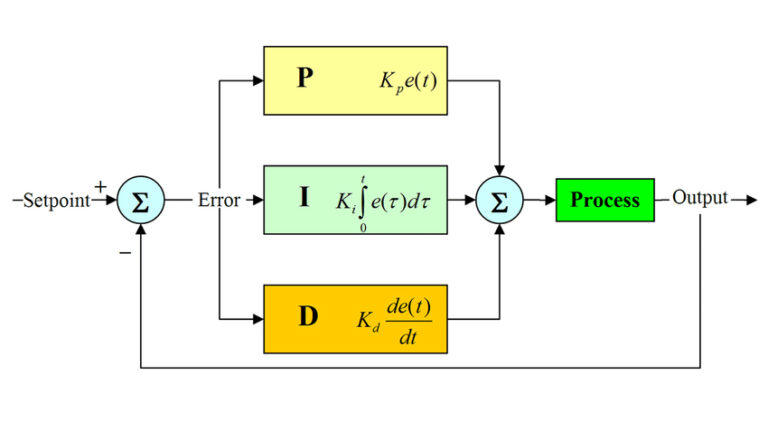
کنترلر PID (Proportional-Integral-Derivative) یک سیستم کنترلی حلقهبسته است که با استفاده از فیدبک، خروجی فرآیند را به مقدار مطلوب (Setpoint) نزدیک میکند. این کنترلر در صنعت برای “بهینهسازی عملکرد سیستمهای دینامیکی ” استفاده میشود.
📌 تفاوت کنترل گسسته و پیوسته
– کنترل گسسته (On/Off, PWM, On/Offدارای هیسترزیس): مبتنی بر منطق صفر و یک (مانند سوئیچهای فشار، سطح، و شیرهای دیجیتال).
– کنترل پیوسته (PID, فازی): مبتنی بر بازههای آنالوگ (مانند ترنسمیترهای 4mA-20mA یا 0V-10V).
📌 اجزای PID و عملکرد آنها
– P (تناسبی): پاسخ سریع به خطا، اما ممکن است “آفست” ایجاد کند.
– I (انتگرالی): حذف خطای حالت ماندگار، اما کند است.
– D (مشتقی): بهبود پایداری سیستم، اما به نویز حساس است.
📌 ترکیبهای رایج PID:
✅ P: زمانی استفاده میشود که وجود آفست در سیستم مهم نبوده و قابلتحمل باشد یا وقتیکه فرآیند به طور طبیعی دارای ماهیت انتگرالی باشد.
✅ PD: اصولاً بهندرت استفاده میشود به همین دلیل در دستهبندی بالا آن را قرار ندادهایم. بهکارگیری PD باعث خواهد شد که سیستم کنترلی با وجود مقادیر بزرگتر بهره کنترلکننده، همچنان پایدار باقی بماند.
✅ PI: مناسب برای سیستمهایی که خطای ماندگار نباید وجود داشته باشد.
✅PID: بهترین گزینه برای سیستمهای با لختی زیاد و نویز کم.
📌 مثال کاربردی:
در سیستمهای آبرسانی، با استفاده از “ترنسمیتر فشار” به عنوان فیدبک و تنظیم PID در اینورتر NEO، میتوان “فشار آب را ثابت” نگه داشت. در این حالت، میتوانیم با تنظیم پارامترهای PID در اینورترهای نئو (NEO) به این هدف دست یابیم.
سنسور فشار به طور منظم سیگنالهای اندازه گیری شده را به عنوان ورودی آنالوگ (0v~10v یا 4mA~20mA) به اینورتر می فرستد. اینورتر با استفاده از ضرایب P ، I و D که قبلا تنظیم شده است فرمان کم یا زیاد شدن سرعت پمپ را از طریق فرکانس کاری به خروجی می فرستد و از این طریق فشار تا حد بسیار قابل قبولی ثابت می ماند.
📊 تنظیمات PID در اینورترهای NEO
✅ پارامترهای اصلی

✅ منابع تنظیم و فیدبک

✅ جهت عمل PID

📊 ویژگیهای پیشرفته PID
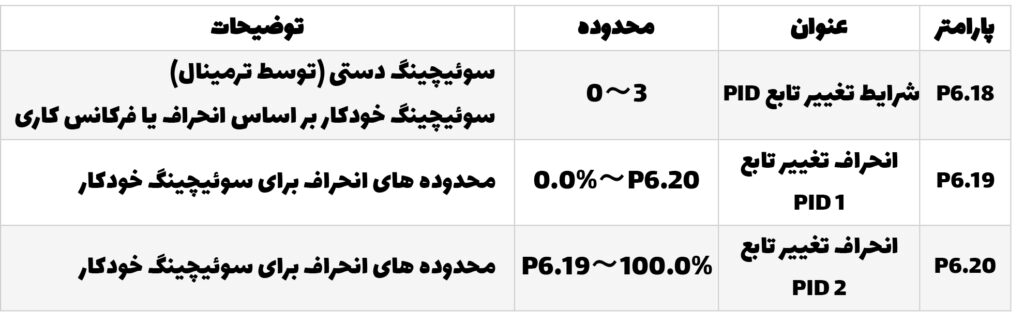
✅ سوئیچینگ پارامترهای PID
✅ محدودیتهای PID

📊 عملکردهای خاص

📊 کاربردهای عملی
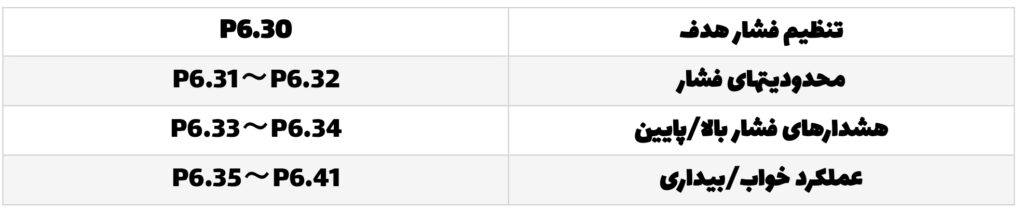
✅ کنترل فشار در سیستمهای آبرسانی
- استفاده از پارامترهای P6.30-P6.42 برای کنترل فشار
✅ کنترل کشش در سیستمهای پیچش/بازپیچش

✅ کنترل دما و جریان
- تنظیم پارامترهای PID برای پاسخگویی بهینه
- استفاده از سوئیچینگ پارامترها برای شرایط کاری مختلف
📊 نکات مهم در تنظیم PID
1. ترتیب تنظیم پارامترها:
- ابتدا KP را تنظیم کنید تا پاسخ سریع به دست آید
- سپس TI را برای حذف خطای حالت ماندگار
- در نهایت TD را برای بهبود پاسخ دینامیکی
2.محدودیتهای مشتقگیری (P6.10) را برای جلوگیری از نوسانات تنظیم کنید.
3. از سوئیچینگ پارامترها (P6.18-P6.20) برای شرایط کاری مختلف استفاده نمایید.
4. تشخیص از دست دادن فیدبک (P6.26-P6.27) را برای ایمنی سیستم فعال کنید.
5. در کاربردهای حساس از محدودیت تغییرات خروجی (P6.23-P6.24) استفاده شود.
📌نتیجه گیری
تنظیم دقیق پارامترهای PIDدر اینورترهای NEO، امکان “کنترل پایدار و دقیق” فرآیندهای صنعتی را فراهم میکند. با استفاده از “ویژگیهای پیشرفته” مانند سوئیچینگ پارامترها و محدودیتهای کنترلی، میتوان به “بهرهوری و ایمنی بالاتر” در سیستمهای صنعتی دست یافت.
🔍 سوالات متداول
❓ بهترین روش تنظیم PID چیست؟
➡️ ابتدا P را تنظیم کنید تا پاسخ سریع شود، سپس I برای حذف خطای ماندگار، و در نهایت D برای کاهش نوسانات.
❓ چرا در برخی سیستمها فقط از PI استفاده میشود؟
➡️ در سیستمهایی که نویز زیاد است یا نیاز به پاسخ خیلی سریع نیست، استفاده از D ممکن است باعث ناپایداری شود.
❓ خطای E-31 نشاندهنده چیست؟
➡️ این خطا نشاندهنده “قطع شدن فیدبک” (مثلاً سنسور فشار) است و باید منبع فیدبک بررسی شود.


